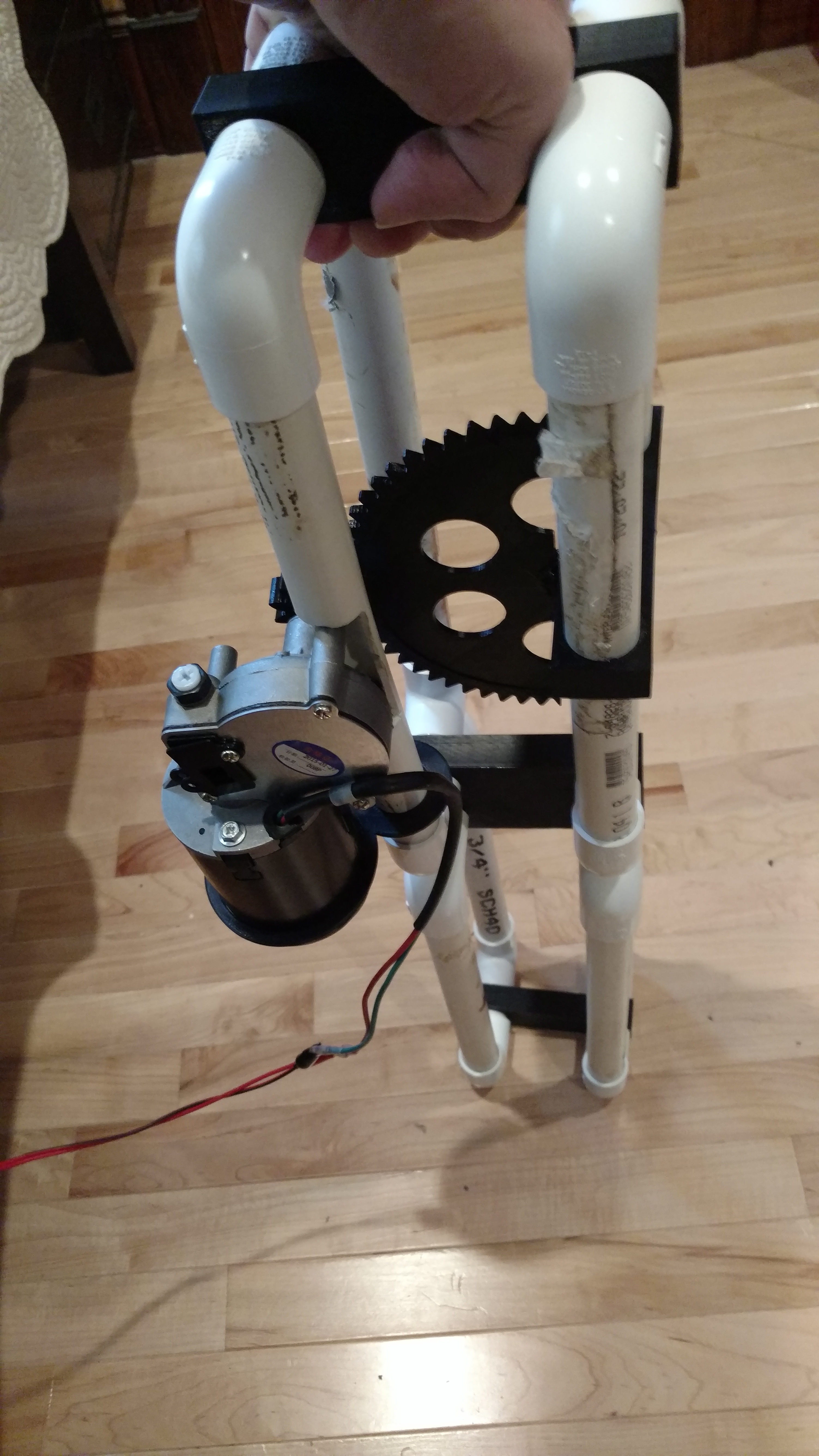
So, I've been watching James Bruton's build of the GNK droid on his Patreon campeign. I was quite impressed with it and I think he has some great ideas. Turns out parallelograms are an interesting choice for legs. By stacking 2 parallelograms on top of each other you can create a leg with a hip, knee and ankle. Regardless of the angle of each of the joints, the orientation of the hip and knee and ankle will always be parallel to the ground. Pretty awesome. So.. I had some 3/4" PVC pipe hanging around and a few worm gear motors to play around with. After a few 3D printed parts to pull things together.. I have my first movements!


I'll update as the build goes on.. just wanted to share with the community a bit more about the direction that I'm going with the InMoov legs..
legs
Nice one kwaters!!! do you know any video where we can see this already working?
thanks,
Pedro
leg amby
hello guys i see your idea leg
i am working to build to leg
you can see my idea here
https://www.youtube.com/watch?v=F2Ss9VvIoy4
https://www.youtube.com/watch?v=uPwDNfseNxA
it is my idea for knee
18Amp Servo driver (DC motor based)
Hi Kevin,
Here the info which I sended yesterday via the shoutbox:
MdG_NL: