Kwatters and others have seen a bad Servo Palsy problem in recent releases.
This post is to document the details and get to the bottom of it
What is it ? :
- It only happens I believe to real hardware
- kwatters can see the symptom very acutely on Harry
-
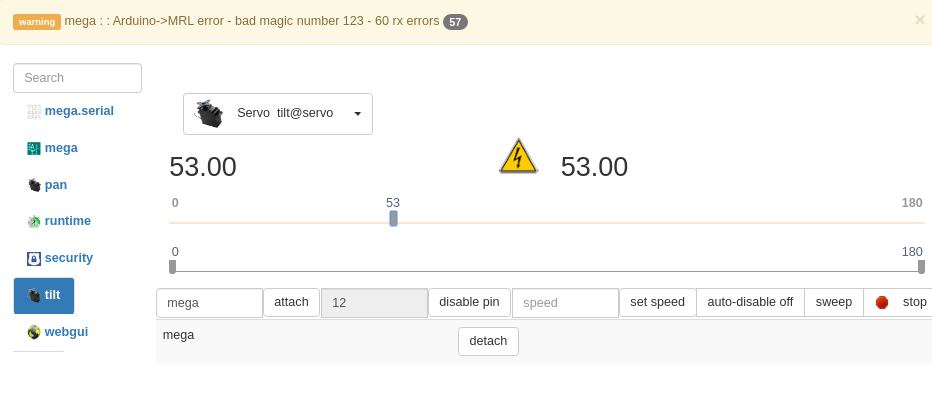
I do not see it with my pan/tilt - but using the webgui i can get mrlcomm errors if i move the lever for servo position around very quickly
kwatters says last october - "servo control and arduino control was rock solid back then."
Several new features have been added:
-
TimerEncoders - an important restructure
http://myrobotlab.org/content/servo-updates -
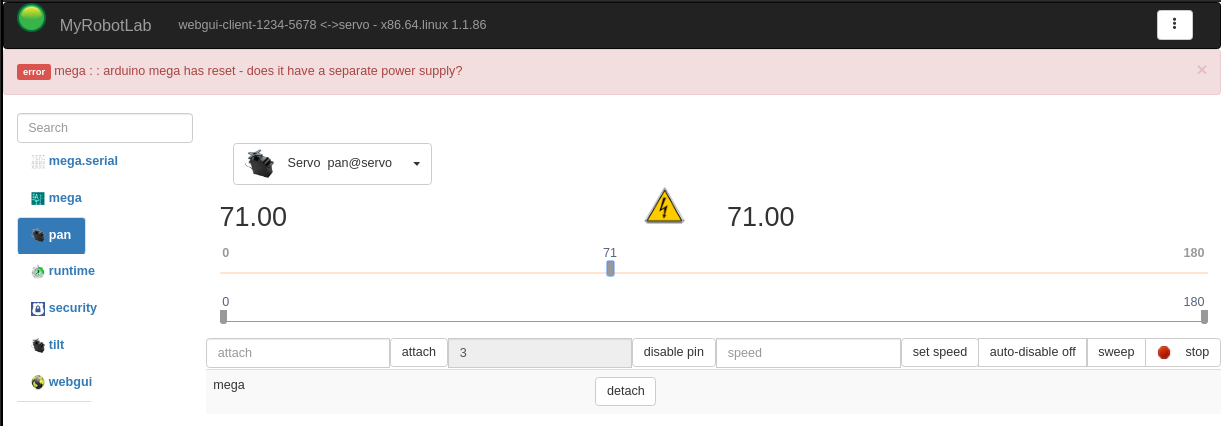
And Arduino brownout recovery - which allows Arduino and Servos to recover after the Arduino suffers a power outage - it gives the user a nice error message too
-
Modularity of ServoControl & ServoControllers - ability of different types of ServoControllers e.g. I2C, RasPi, etc to more easily be swapped with Arduinos and their interfaces conforming to the generic mrl pub/sub
I put considerable work into these features. There should be a way to integrate them and remove servo palsy.
If you have experimented with the develop branch please let us know your experiences and we'll put an end to Servo Palsy !
Update : On my test system I
Update :
On my test system I have 2 servos (pan & tilt). I can only generate MRL errors through the webgui with the tilt servo. Under considerable testing I have not been able to make a single error with the pan servo. I suspect now my errors have to do with the fact that my tilt servo is very electrically noisey ..
So, I have not been able to generate any errors from the webgui that are software related ...
I haven't tested speed control, which I'll do next
Is Servo Palsy specific to
Is Servo Palsy specific to speed control ?