Virtual Arduino - (virtual.logic tab is simply a Python service running emulation logic) - Aren't virtual pins cool ! We have analog & digitial now
We now have the tab with the correct version of MRLComm for that release - a good thing
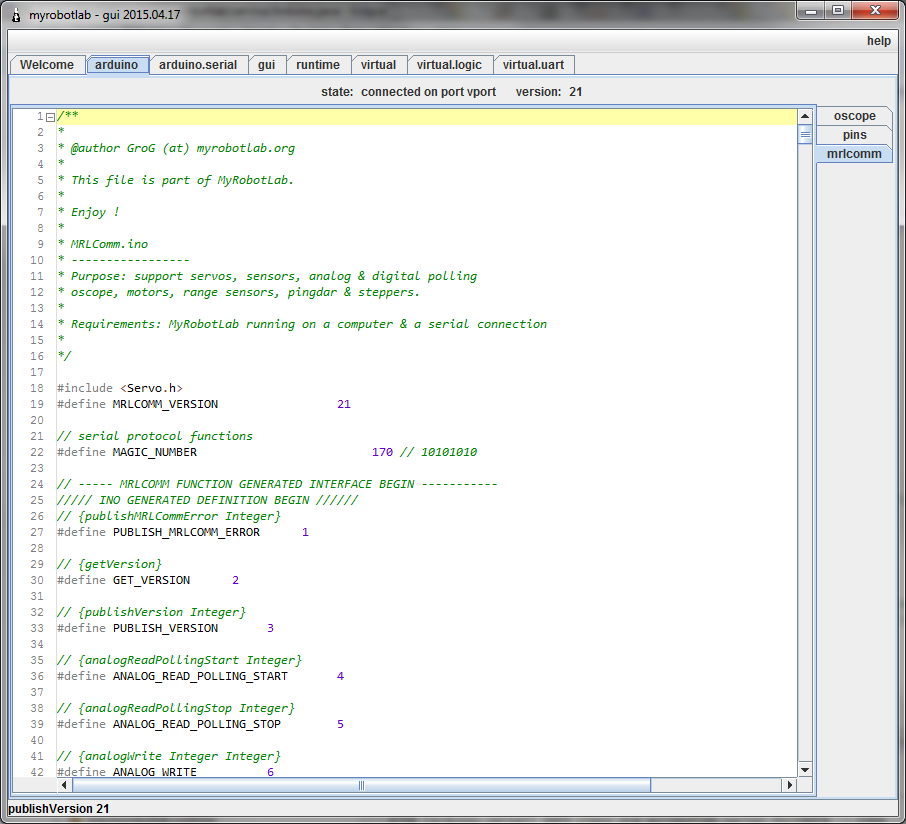
oops
Progress thanks to Gareth .. cause and effect .. effect needs some work ;)
Thanks Sir Gareth Master Blender-Fu Sensei !
.png)
Gareth has rigged more joints WOOHOO !.. and shifted all rotational values to the local X axis Yay !
Now I got to map all this so a regualr InMoov script does not drive him to contortions and release virtual smoke ! Tried some of the common big scripts but I see I have to start with small pieces.....
Ouch I borked my neck ! ... Elves are trying to glue Gareth's rigging to MRL ... needless to say, "Needs some work!"
The MRL Blender service is going pretty well - this is an example of a control script...
https://github.com/MyRobotLab/pyrobotlab/blob/master/home/GroG/BlenderVirtualInMoovControl.py
There is very little "special" coding needed to switch InMoov from virtual to real and back again, which is a design goal.
2015.04.05
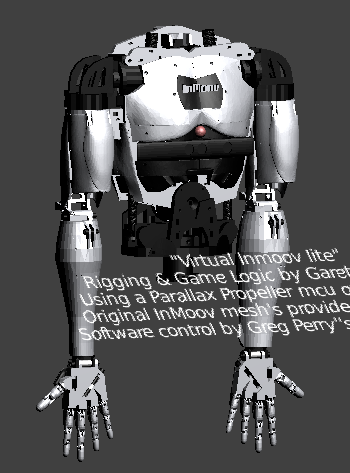
Another thing coming out in Release 108 will be Virtual InMoov .. Now that all the Serial and Arduino services have been fixed in such a way so that they support virtual ports.
Virtual ports are serial ports over internal queues or tcp/ip connections - so serial "wires" now stretch internally to virtual devices.
The picture is Gareth master rigging in Blender - with 2 virtual Arduinos and quite a few servos attached. Some mapping will be needed to correct angles, that's why the head has moved into the back :P. Also, the master rigger might be so kind as locally re-orient the bones so they follow the same axis as the servos (always on x).
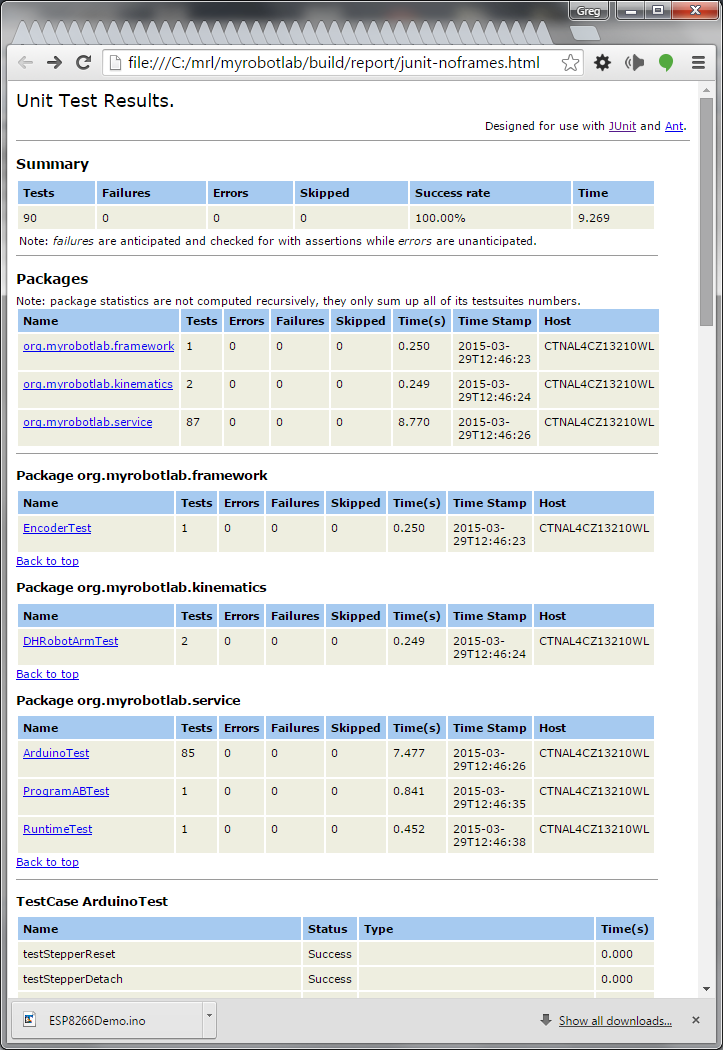
Here is the resulting report from auto-test in the build script - next would be to post this automatically from Travis-CI after ever build....
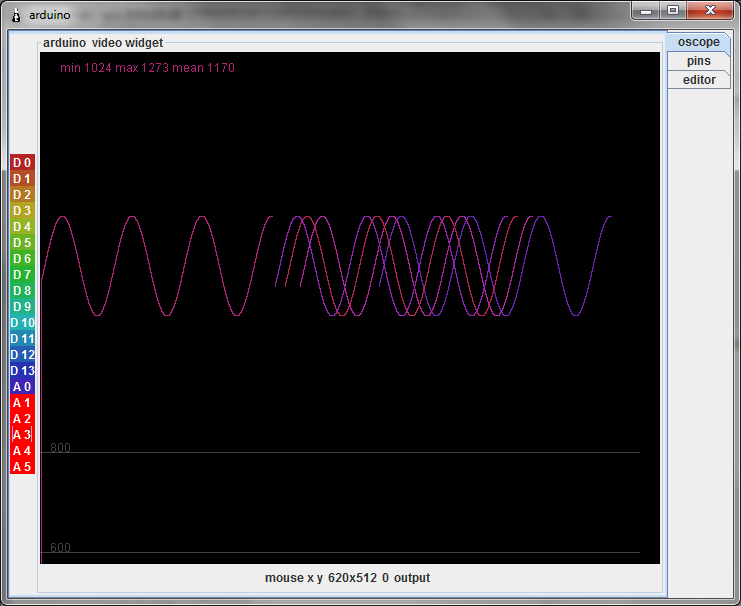
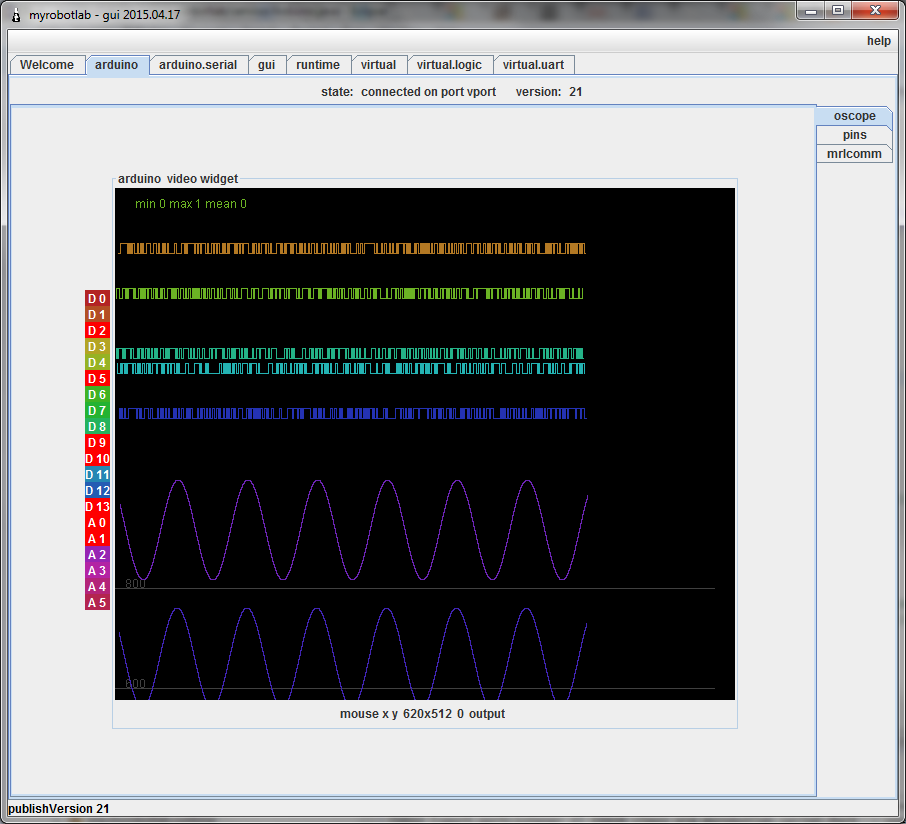
Many sensors :) ... Virtual Python now is sending data back on multiple analog lines - was very interesting when I started starting a bunch of other applications on my computer I had the pleasure of watching buffer overruns happen, and then the whole graph go crazy ! - with a buffer overrun the codecs begin exploding and the graph looks like spagetti ! :) But for the most part - its pretty solid with 5 Analog lines running simultaneously - probably runs faster than real hardware ... lots more testing to do
2015.03.27:15:22 LOOK AT MY "PERFECT" SENSOR !!! 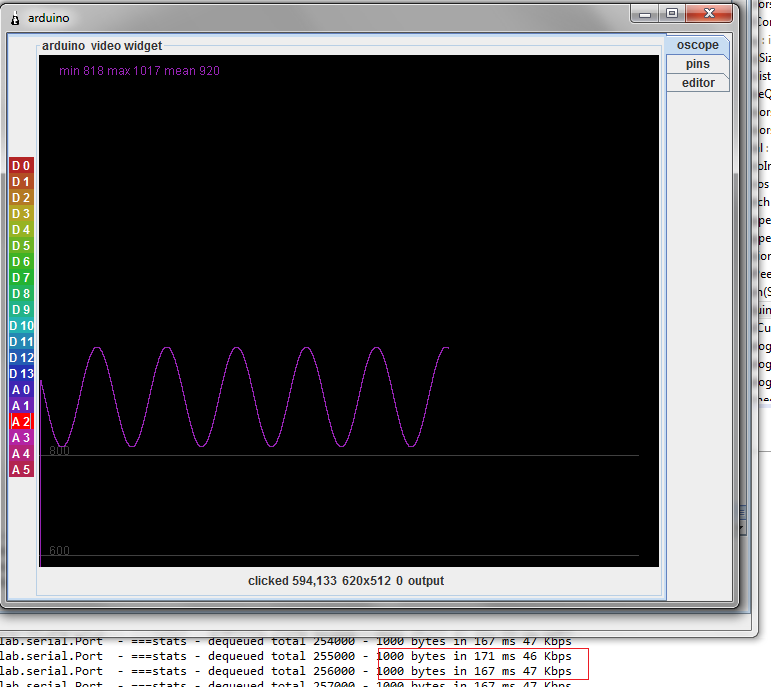
Its sending back Virtual sensors are starting to work well. The Python Virtual Arduino is now multi-threaded, and here I'm testing one of the analog pins. Interestingly the data rate is very similar to the data rate I get with real hardware ... hmmm.....
2015.03.27:15:22
.png)
Better now .. saw where a reference to a Pin was being used on 2 different threads - explains most of the weirdness.. Here we have a regular sawtooth - which is what I'd expect .. still have some buffer overruns which cause the graph to get wonky - but the rate at which Python can send out data is probably much higher than a 57k Bps serial port can handle...
This is a review of up-coming functionality in Release 108. Here is a list of the large changes in 108.
- Arduino service now uses the Serial service for all serial communication (as do all other services) - Important architectual changes as all serial fixes, enhancments, or improvements are done in only 1 place (duplicate code is bad)
- Serial service improved greatly. Serial service can open all sorts of different ports. It has the ability to open regular hardware COM ports, TCP/IP, and virtual ports.
- Robust virtual ports - previously virtual ports were "kludged" together. Now VirtualPorts are well defined software constructs which can be used in automated testing.
- Automated testing - all tests will be moved into JUnit and a rigorous set of service tests will be continually developed as MRL grows. This is the only way that such a small group can create and maintain a large and expanding code base.
- Refactored Serial Libraries - MRL's serial library was a bit of a mess - its all been refactored and the common unit for all serial communication is a Port
- RXTXLib "normalized" - rxtxlib does not conform to Java's standards - but this out-of-spec is fixed in a sublcass and all Ports conform to the standard.
Nice Python errors published to gui
Virtual Arduino - a pre-configured Virtual Device
Easy virtual Arduino testing
vport = "VPORT"arduino = Runtime.start("arduino", "Arduino")
virtual = Runtime.start("virtual", "VirtualDevice")virtual.createVirtualArduino(vport)
arduino.connect(vport)
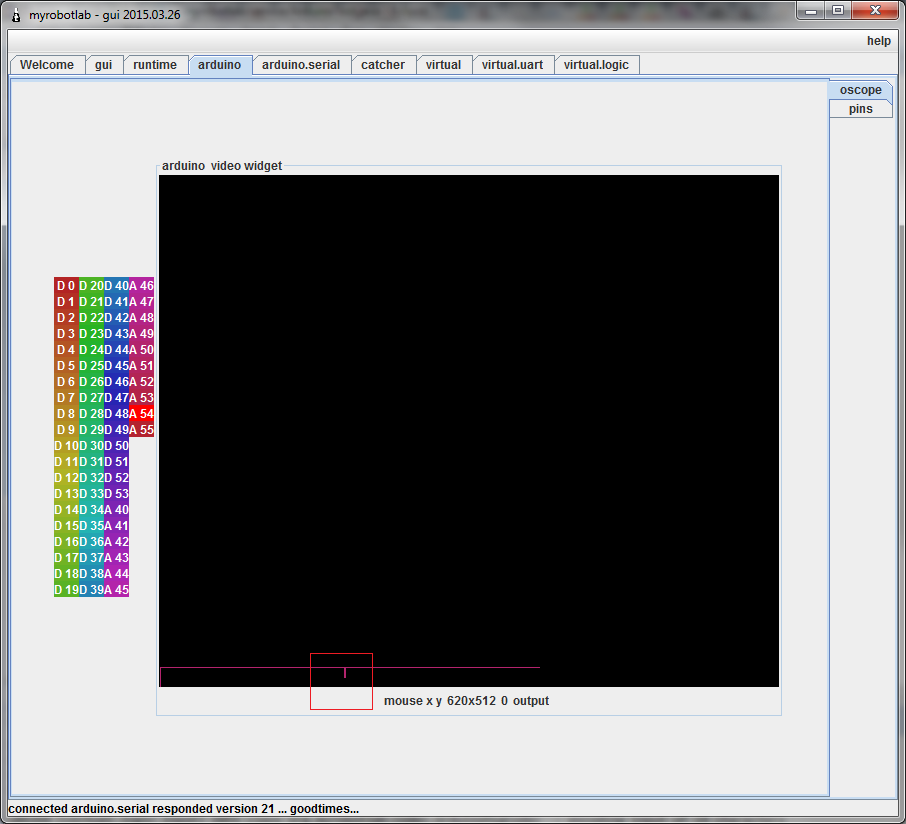
at the core of the virtual device is another Python service so you can create any bizarre hardware abmnormalities you may want to simulate ! Uh, this one is coming from my Arduino.py script which emulates how a "real" hardware Arduino would be have when asked to start polling on an analog pin ..
Uh .. but there's a glitch somewhere - I was expecting a FLAT LINE !! .. What?!?!? how is this possible .. probably a virtual short circuit :)
Oscope
Grog, is it possible to use filters in the oscope, to make it like a logic analyzer? If it can be used to amplify signals, or the opposide, it would be great, so it could even be like a real oscope!
Ya, scaling, timing, trigger,
Ya, scaling, timing, trigger, filtering and lots of other functionality - but I'm not sure I want to invest that time in the old GUI - I'd like to build the new Oscope/Digital analyzer as a web app.
Like this maybe - https://github.com/html5-oscilloscope/html5-oscilloscope
or these
https://www.google.com/search?q=html5+oscilloscope&espv=2&biw=1745&bih=…
Unit test?!!?!
Awesome! 100% passing ... auto testing elves are a great thing!
90°
Thats looking very close GroG.
What I see is left arm is "backwards"
most other joints in motion are 90° out of phase almost like the end motion of the joint.
I would like to see this picture with all joints set to 90°, as I think a lot are (errr) joints are centered at this value.
I will try to get my bridge working asap and see I can iron out a few plus's and minus's in the direction of movement.
The other good news is you may have contorted VinMoov, however all its joints stayed connected.....so the bolts are tight... \é/
Ya your virtual glue is
Ya your virtual glue is holding well !
This is what inmoov looks like "at rest"
i01.rest() is not all (in fact few) are at 90 degrees - but its at rest according to Gael's original ...
MRL's servos have the ability to "map" so I can start mapping scalars to start getting things aligned
The neck is a little problematic .. its one of the servos which is supposed to be at 90 degrees but when I hit 90 it does a flip ...
it's worky here!
awesome! I was able to fire up blender & the blender service.. I saw the motion ...
The rigging/ bones have some need for updates, but this is pretty awesome, cause & effect.. move slider,, arm moves..
Great Work! It's getting there.