Markus and I have been working on getting this little Arduino to work with MyRobotLab. You might think it is as trivial as plugging it in and loading MRLComm.ino and starting an Arduino service in MRL. I wish ! :)
I'm writing this post to try to understand some of the "challenges" of getting the Micro to work.
Here are some things I've noticed :
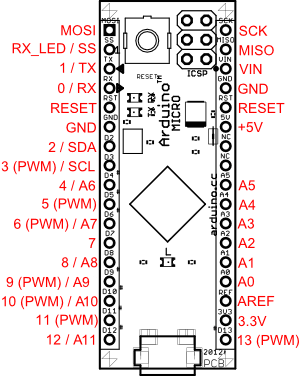
- The micro is tiny ! - it does not come with a co-processor for handling serial data - instead it creates a virtual port in software.
- Potentially, they are inexpensive .. I bought 3 for $7 !
- I have found the com ports are ONLY FOUND ON ONE OF MY LAPTOPs usb ports ! This is very strange behavior - perhaps it work with only a specific usb standard (min current ?)
- resetting the board makes the serial port go away ;P
- unplugging re-plugging the board makes the serial port come back (Windows 7 64bit)
2015.07.04 - Happy 4th of July !
Micro found on COM port 22 - loading very basic sketch hopefully to the serial monitor
void setup() // run once, when the sketch starts
{Serial.begin(9600); // set up Serial library at 9600 bps}void loop() // run over and over again{Serial.println("Hello world!"); // prints hello with ending line breakdelay(1000); // waits for a second}
Worky !!!
