Press Full Screen to watch.
This post is to examine the details of Pingdar.
.png)
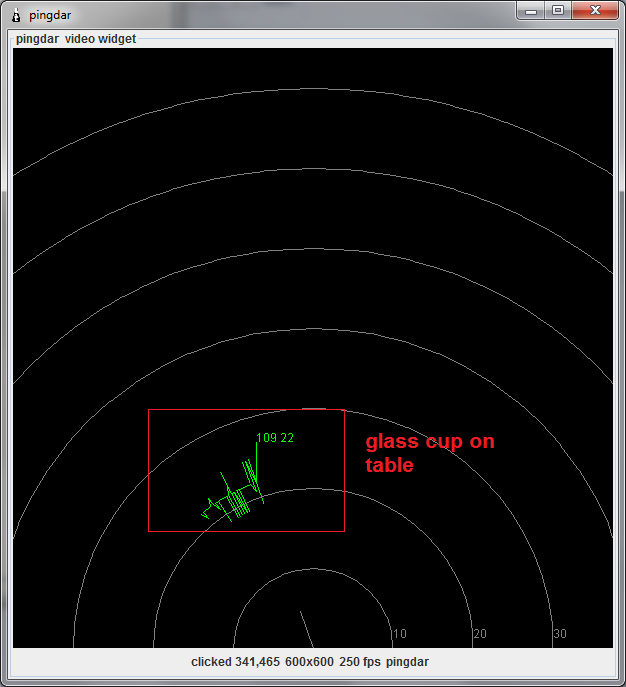
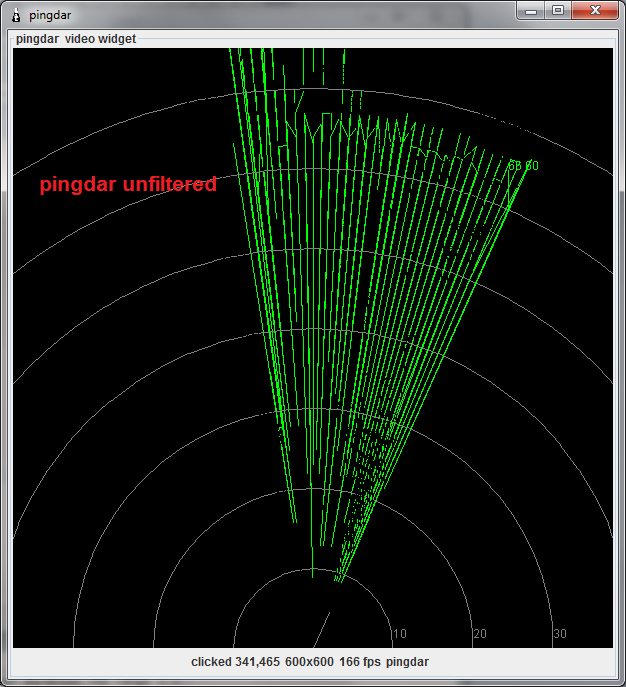
This is "raw" Pingdar. Or almost raw .. I think "0" values are filtered out. I think it might be an issue of harmonics/reverberations.
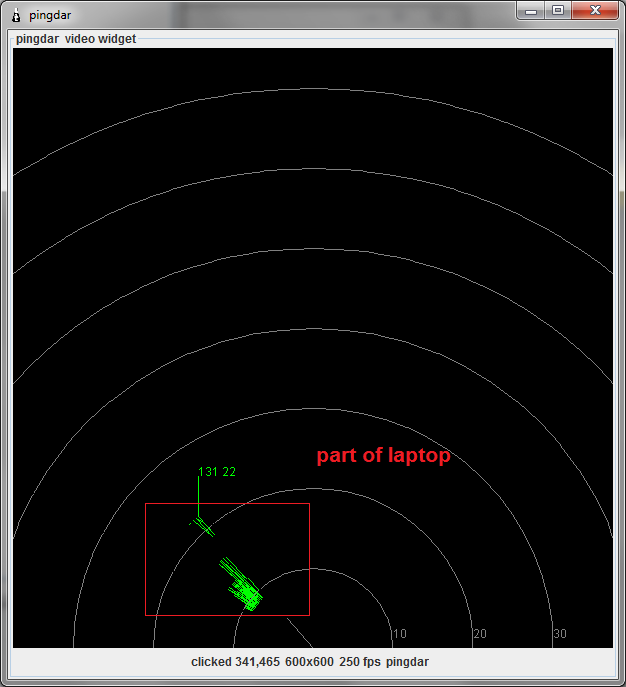
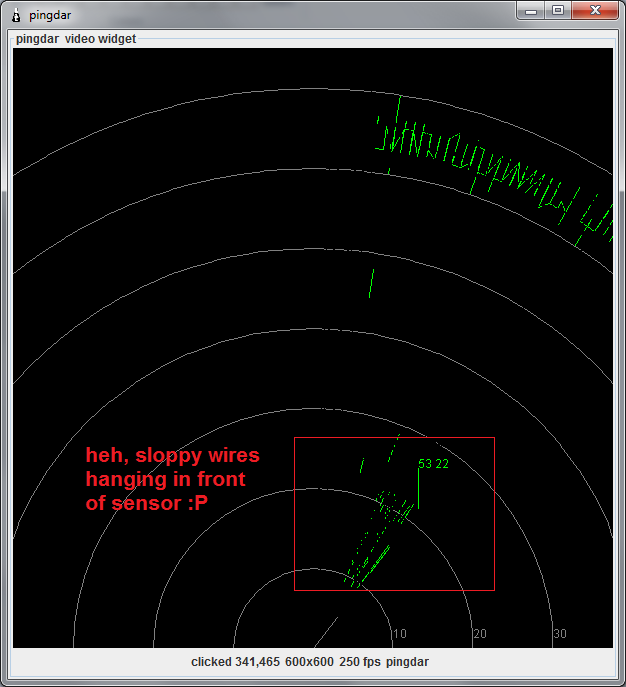
A loud ping is sent out, and maybe the main signal is processed, but there are echos which fly around and can activate the sensor. This possibly could be reduced several ways. The way I am reducing it is very simple. If my current point is "too far" from my last point I don't use it. All the previous screenshots use this filtering, but the "pingdar unfiltered" does not.
I curious to see how PID would filter - I expect smoother lines from PID. Filtering is important, but the best way is to solve the problem at the source. The question is: How do we make less echo and clean the data up at the source?
Maybe reducing the sample rate would be a good thing.
Problem:-(
Hi GroG, very nice work I tried to reply it, but it say that in : pingdar.sweep(): expected 0 or 2 args; got 3.
the command line is: pingdar.sweep(10, 170, 1). I have upload MRLComm2 in the Arduino before starting MRL. Anyway nothing happens even the sensor and the servo do nothing.
Please help me.
Thank you