Setting "omoplate" servo and potentiometer to default "Rest" position 10 on a range from 0 to 180
To reach this value you may have to rotate slightly your potentiometer in it's bracket.
.JPG)
When omoplate is at default 10 position there is no gap between these two parts

See video for the omoplate movement:
https://docs.google.com/file/d/0B4UWbgEG77SkTFMxaFJHTzJtczA/edit?usp=drive_web
##############################################################################
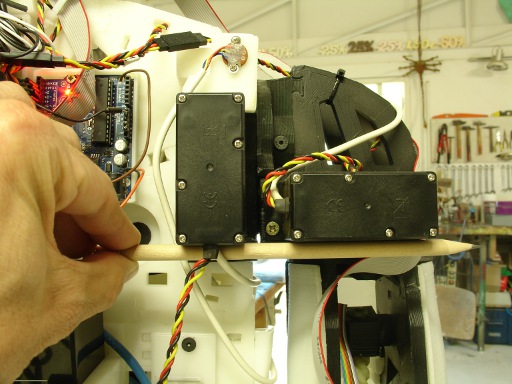
Setting "shoulder" servo and potentiometer to position 33 on a range of 0 to 180. It is not the default position for "rest" but this way, we can align the two servos seen from the back of InMoov.
To reach this value you may have to rotate slightly your potentiometer in it's bracket.
See video for the shoulder movement:
https://drive.google.com/file/d/0B4UWbgEG77SkZmo1OEdMZ3Z4SjA/edit?usp=sharing
##############################################################################
Setting "rotate" servo and potentiometer to default "Rest" position 90 on a range of 0 to 180.
Align the parts as shown on the pictures.
To reach this value you may have to rotate slightly your potentiometer in it's bracket.


See video of the "rotate" servo movement:
https://drive.google.com/file/d/0B4UWbgEG77SkN3dPS0czdGRTRDQ/edit?usp=sharing